サーボモーターの構成
要件:Adafruit16チャネル/ 12ビットPWMボードがI²Cを介して接続され、モデルサーボが最初のPWMチャネルに配線されています。
The SoftMotion Servo Example.project プロジェクトには、次のようなアプリケーションが含まれています CODESYS SoftMotion モデルサーボモーターと組み合わせて使用されます。 I²Cを介して接続された拡張ボード(Adafruit ID 815)が通信インターフェースとして使用されます。
を開きます
SoftMotion Servo Example.projectプロジェクトして更新します。デバイスツリーで、ダブルクリックします 端末。
デバイスエディタが開きます。
の 通信設定、 クリック スキャンネットワーク。
Raspberry Piと開発システムが同じネットワーク上にある場合は、RaspberryPiが表示されて選択できます。
それを選択してクリックします 。
アプリケーションがRaspberryPiにダウンロードされます。
プログラムを起動します( F5 鍵)。
サーボモーターは左から右へと着実に回転し始めます。 The
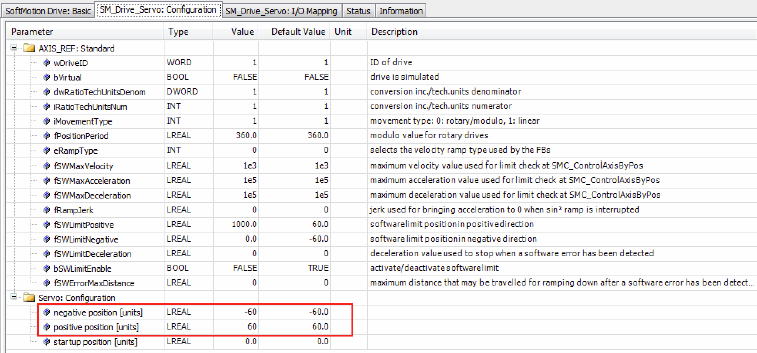
PLC_PRGSFCで実装されたプログラムがこれを担当します。軸をオンに切り替えてから、で終了位置として指定された-60と+60の位置の間を移動します。SM_Drive_Servo軸構成。位置プリセットは、モデリング サーボで通常行われているように、PWM インターフェースを介して転送されます。 1 ~ 2 ミリ秒の長さの HIGH パルスが、固定周波数 (デフォルト: 50 Hz、Adafruit PWM SoftMotion デバイスのパラメーター) で送信されます。 1 ms は下端位置、2 ms は上端位置を表します。可動範囲はモーターの種類により異なります。モーターが角度で制御されている場合は、可動範囲を測定する必要があります。これを行うには、終了位置 (例では -60、+60) まで駆動し、構成画面で測定位置を入力します。
任意のブラウザ(おそらくスマートフォン)を開き、アドレスを指定します
<network address>:8080/webvisu.htm。ビジュアライゼーションが開き、生成された指定位置が表示されます。ベロシティをコントロールできます。